A robot’s got to know its limitations. But that doesn’t mean it has to accept them. This one in particular uses tools to expand its capabilities, commandeering nearby items to construct ramps and bridges. It’s satisfying to watch but, of course, also a little worrying.
This research, from Cornell and the University of Pennsylvania[1], is essentially about making a robot take stock of its surroundings and recognize something it can use to accomplish a task that it knows it can’t do on its own. It’s actually more like a team of robots, since the parts can detach from one another and accomplish things on their own. But you didn’t come here to debate the multiplicity or unity of modular robotic systems! That’s for the folks at the IEEE International Conference on Robotics and Automation, where this paper was presented (and Spectrum got the first look[2]).
SMORES-EP is the robot in play here, and the researchers have given it a specific breadth of knowledge. It knows how to navigate its environment, but also how to inspect it with its little mast-cam and from that inspection derive meaningful data like whether an object can be rolled over, or a gap can be crossed.
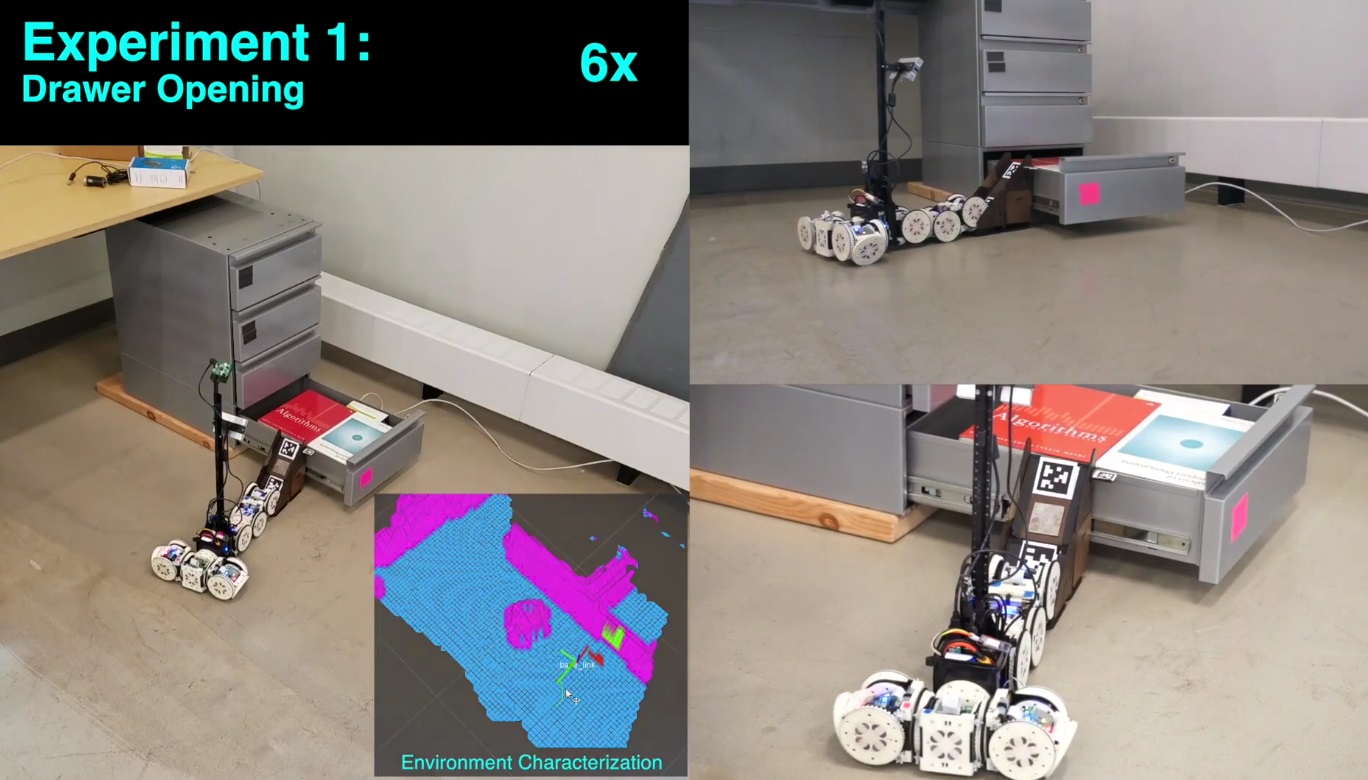 It also knows how to interact with certain objects, and what they do; for instance, it can use its built-in magnets to pull open a drawer, and it knows that a ramp can be used to roll up to an object of a given height or lower.
It also knows how to interact with certain objects, and what they do; for instance, it can use its built-in magnets to pull open a drawer, and it knows that a ramp can be used to roll up to an object of a given height or lower.
A high-level planning system directs the robots/robot-parts based on knowledge that isn’t critical for any single part to know. For example, given the instruction to find out what’s in a drawer, the planner understands that to accomplish that, the drawer...